Note
Go to the end to download the full example code.
Benchmark Carvallo-Whipple Model¶
Meijaard et al. presents a benchmark minimal linear Carvallo-Whipple bicycle model ([Meijaard2007], [Carvallo1899], [Whipple1899]) with 27 unique constant parameters and two coordinates: roll angle \(\phi\) and steer angle \(\delta\).
import numpy as np
from bicycleparameters import Bicycle
from bicycleparameters.io import remove_uncertainties
from bicycleparameters.parameter_sets import Meijaard2007ParameterSet
from bicycleparameters.models import Meijaard2007Model
data_dir = "../../data"
Benchmark Parameter Values¶
First, create a Bicycle object from the
parameter file in the data directory.
bicycle = Bicycle("Benchmark", pathToData=data_dir)
Looks like you've already got some parameters for Benchmark, use forceRawCalc to recalculate.
Strip the uncertainties from the parameters and add a speed parameter
\(v\), then create a
Meijaard2007ParameterSet set from
the parameter values.
par = remove_uncertainties(bicycle.parameters['Benchmark'])
par['v'] = 4.6
par_set = Meijaard2007ParameterSet(par, True)
par_set
The bicycle geometry and representations of the inertia of the four rigid bodies (B: rear frame, F: front wheel, H: front frame, R: rear wheel) can be visualized with the parameter set plot methods.
ax = par_set.plot_all()

Linear Carvallo-Whipple Model¶
Create a Meijaard2007Model that represents
linear Carvallo-Whipple model presented in [Meijaard2007] and populate it
with the parameter values in the parameter set.
model = Meijaard2007Model(par_set)
This model can be written in this form:
where the essential coordinates are the roll angle \(\phi\) and steer angle \(\delta\), respectively:
and the forcing terms are:
The model can calculate the mass, damping, and stiffness coefficient matrices, which should match the paper’s results when using the matching parameter values:
M, C1, K0, K2 = model.form_reduced_canonical_matrices()
M
array([[80.817, 2.319],
[ 2.319, 0.298]])
C1
array([[ 0. , 33.866],
[-0.85 , 1.685]])
K0
array([[-80.95 , -2.6 ],
[ -2.6 , -0.803]])
K2
array([[ 0. , 76.597],
[ 0. , 2.654]])
The root locus can be plotted as a function of any model parameter. This plot is most often used to show how stability is dependent on the speed parameter.The blue lines indicate the weave eigenmode, the green the capsize eigenmode, and the orange the caster eigenmode. Vertical dashed lines indicate speeds that are examined further below.
v = np.linspace(0.0, 10.0, num=401)
ax = model.plot_eigenvalue_parts(v=v,
colors=['C0', 'C0', 'C1', 'C2'],
hide_zeros=True)
for vi in [0.0, 2.0, 5.0, 8.0]:
ax.axvline(vi, color='k', linestyle='--')
ax.set_ylim((-10.0, 10.0))

(-10.0, 10.0)
Modes of Motion¶
When populated with realistic parameter values the linear Carvallo-Whipple model exhibits four characteristic eigenmodes that transition into three eigenmodes when two roots bifurcate into an imaginary pair.
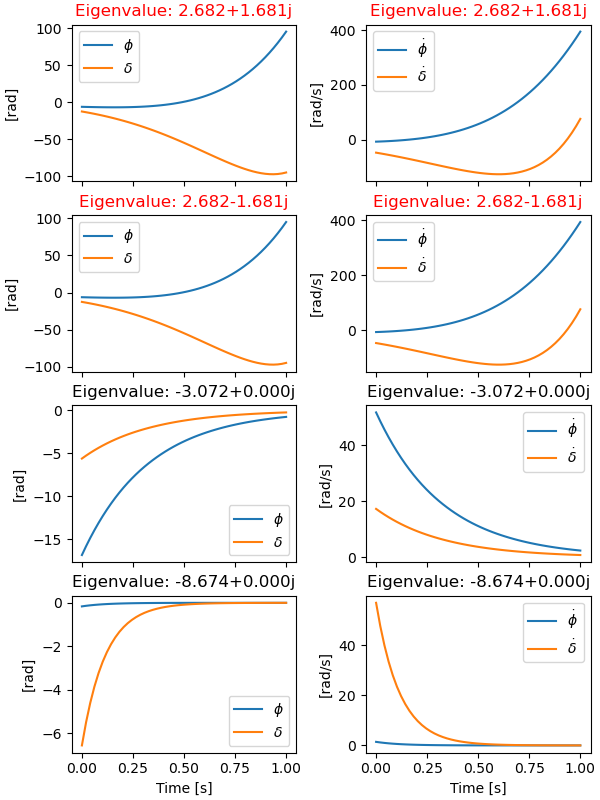
Low Speed, Unstable Inverted Pendulum¶
Before the bifurcation point into the weave mode, there are four real eigenvalues that describe the motion.
ax = model.plot_eigenvectors(v=0.0)
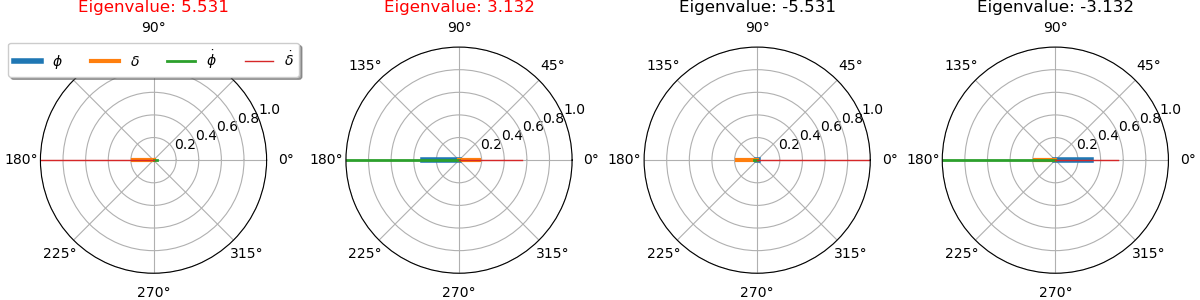
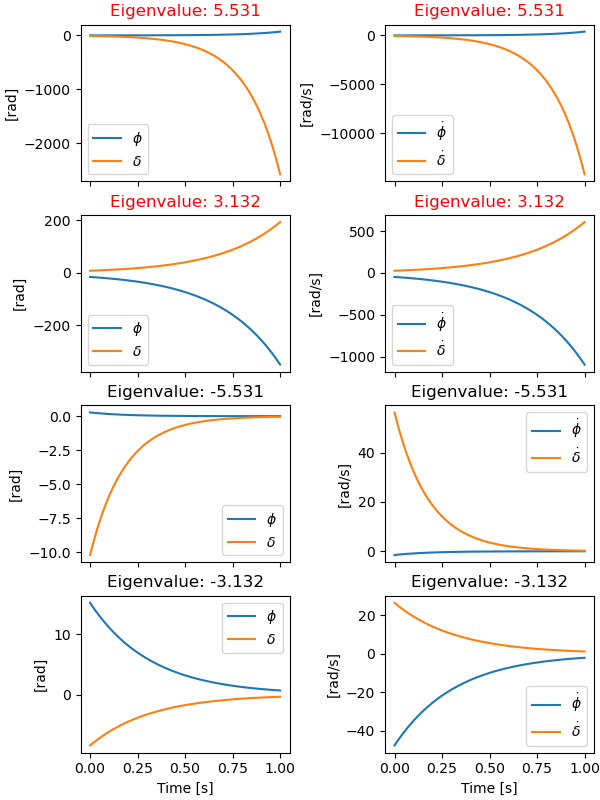
The unstable eigenmodes dominate the motion and this results in the steer angle growing rapidly and the roll angle following suite, but slower.
times = np.linspace(0.0, 1.0)
ax = model.plot_mode_simulations(times, v=0.0)
The total motion shows that the bicycle falls over, as expected.
ax = model.plot_simulation(times, [0.01, 0.0, 0.0, 0.0], v=0.0)
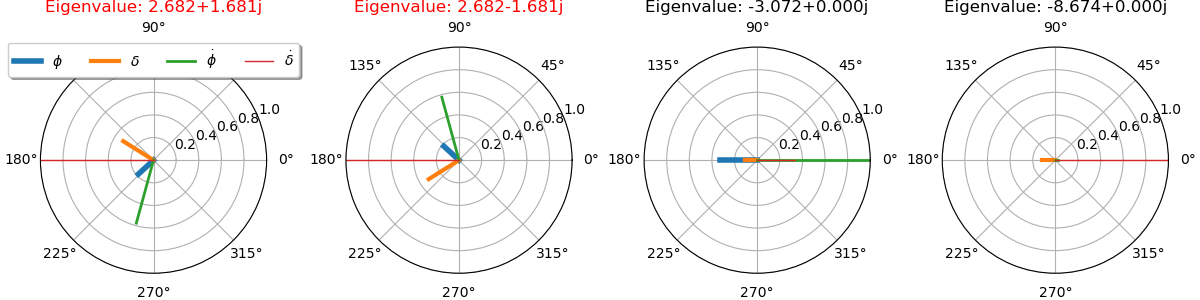
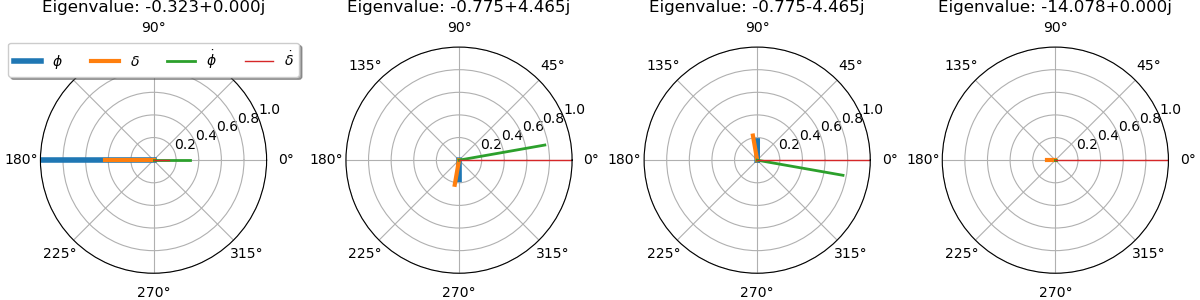
Low Speed, Unstable Weave¶
Moving up in speed past the bifurcation, the bicycle has an unstable oscillatory eigenmode that is called “weave”. The steer angle has about twice the magnitude as the roll angle and they both grow together with close to 90 degrees phase. The other two stable real valued eigenmodes are called “capsize” and “caster”, with capsize being primarily a roll motion and caster a steer motion.
ax = model.plot_eigenvectors(v=2.0)
times = np.linspace(0.0, 1.0)
ax = model.plot_mode_simulations(times, v=2.0)
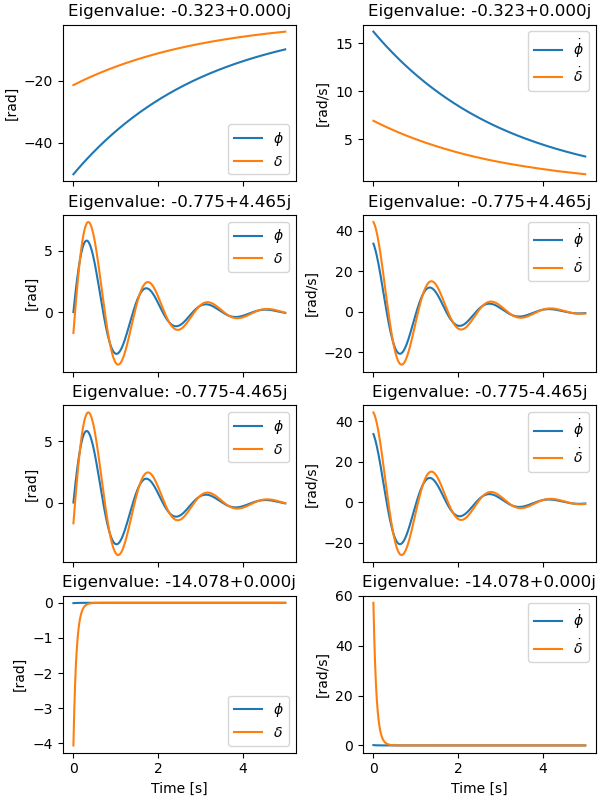
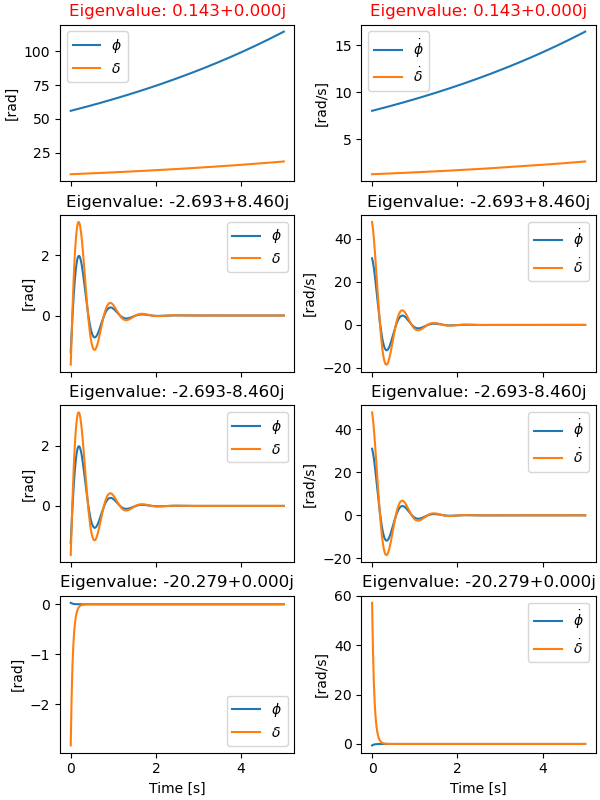
Stable Eigenmodes¶
Increasing speed further shows that the weave eigenmode becomes stable, making all eigenmodes stable, and thus the total motion is stable. The speed regime where this is true is called the “self-stable” speed range given that stability arises with no active control. The weave steer-roll phase is almost aligned and the caster time constant is becoming very fast.
ax = model.plot_eigenvectors(v=5.0)
times = np.linspace(0.0, 5.0, num=501)
ax = model.plot_mode_simulations(times, v=5.0)
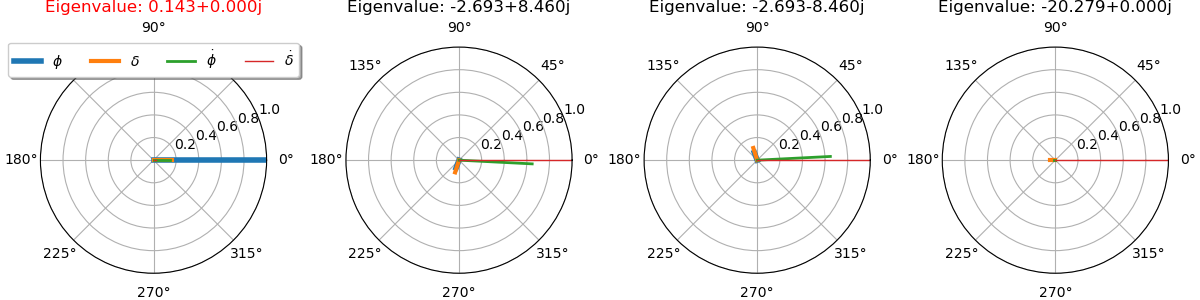
High Speed, Unstable Capsize¶
If the speed is increased further, the system becomes unstable due to the capsize mode. The weave steer and roll are mostly aligned in phase but the roll dominated capsize shows that the bicycle slowly falls over.
ax = model.plot_eigenvectors(v=8.0)
ax = model.plot_mode_simulations(times, v=8.0)
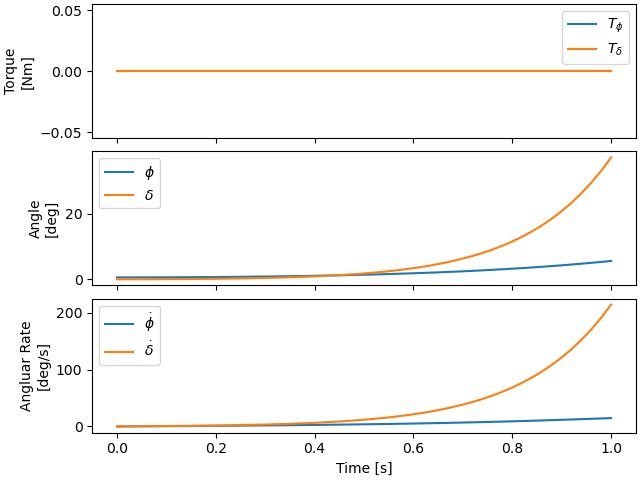
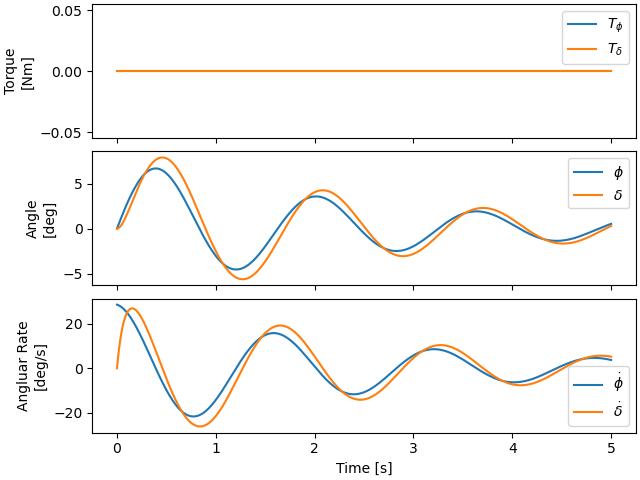
Total Motion Simulation¶
The following plot shows the total motion with the same initial conditions used in [Meijaard2007] within the stable speed range at 4.6 m/s.
x0 = [0.0, 0.0, 0.5, 0.0]
ax = model.plot_simulation(times, x0)
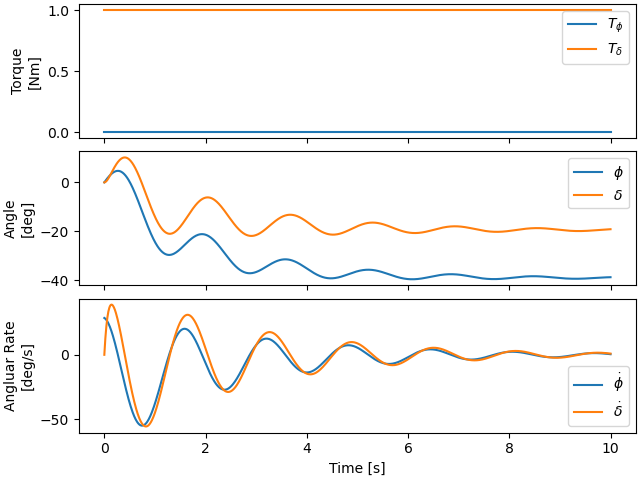
A constant steer torque puts the model into a turn.
times = np.linspace(0.0, 10.0, num=1001)
ax = model.plot_simulation(times, x0,
input_func=lambda t, x: [0.0, 1.0])
Total running time of the script: (0 minutes 5.176 seconds)